南方科技大学生物医学工程系张明明助理教授研究团队2019级博士研究生钟斌在机器人工程领域旗舰期刊IEEE Transactions on Automation Science and Engineering(IF=5.293)上发表最新研究成果,该研究提出了一种基于滑模控制策略的下肢外骨骼关节位置及柔性同步控制算法,适用于人造气动肌肉驱动的康复设备,实现了按需辅助的柔顺控制提升了康复的效果。
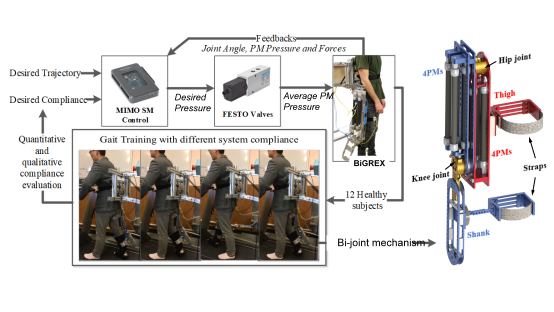
按需辅助策略能够显著提升患者在机器人辅助康复过程的积极性从而提升康复效果,同时人机交互的安全性是所有康复设备的首要考虑因素。人造气动肌肉其独特的柔性使得它可以作为康复设备驱动器的良好选择,而气动肌肉自身固有的非线性特点也使得构建精确的数学模型极具挑战。该研究提出了一种采用人造肌肉的平均压力作为反馈来评估患者的实时参与程度,并同步实现关节位置控制和关节柔性控制。关节的柔性及辅助力大小通过反馈评估进行实时调节,最终实现按需辅助的康复策略。验证实验一共12受试者参加,实验结果表明,系统在该算法下能够以较小的误差跟随下肢关节的运动,同时评估受试者的参与程度进行辅助力调节。该研究结果对人造气动肌肉在康复设备中的广泛应用具有重要意义。
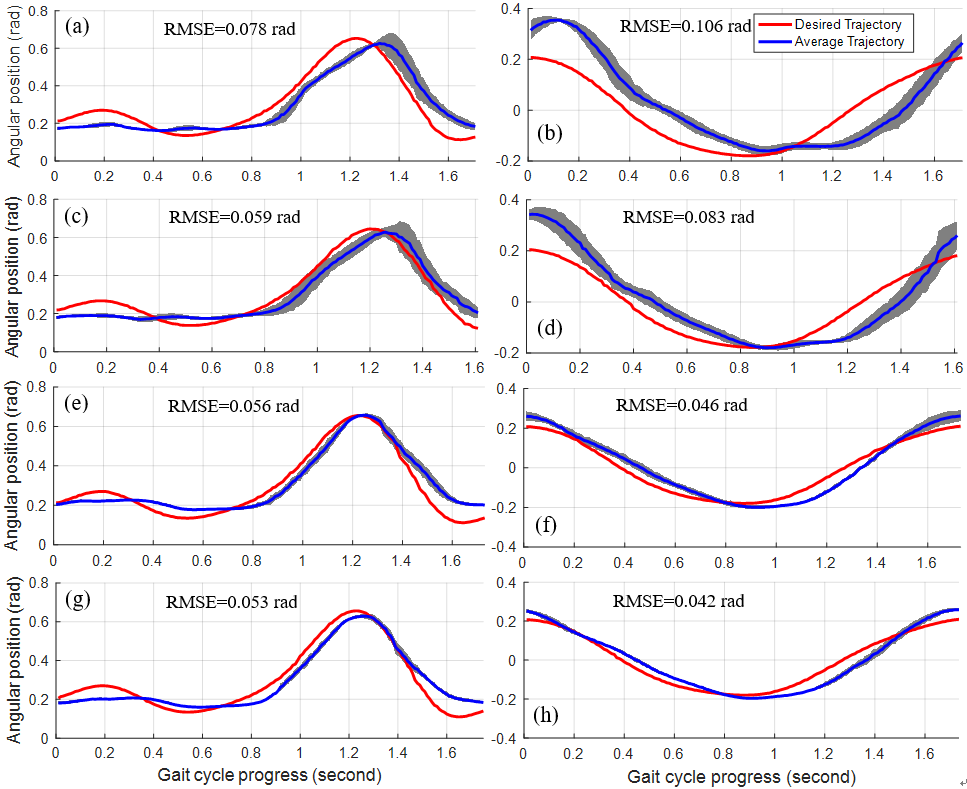
The comparison between the desired and actual gait trajectories of the two actuated joints during the validation experiments. The trajectories have been normalized to one gait cycle. The red lines are the predefined reference gait trajectory. The blue lines represent the average gait trajectories over the experimental period. The shaded area stands for the standard deviations of the average trajectories over the recorded gait cycles. Subplots (a, c, e, g) are the trajectories of the knee joint and subplots (b, d, f, h) are for the hip joint. The subplots in the top, second, third and bottom rows are for experiments with desired average antagonistic PM pressures 160, 240, 320 and 400 KPa respectively.
南科大2019级博士生钟斌为本文第一作者,张明明助理教授为通讯作者,南科大为第一单位和通讯单位。该研究获得了国家自然科学基金、广东省自然基金和广东省普通高校青年创新人才项目的资助。
供稿:钟斌

广东省深圳市南山区
学苑大道1088号
bme@sustech.edu.cn

关注微信公众号




