中风是目前造成成年人残疾的首要原因。研究表明,在卒中后的6个月内进行及时有效的康复治疗对患者恢复运动能力是至关重要的。近年来,越来越多的可穿戴外骨骼机器人走入临床,有意探索康复机器人干预下的中枢神经系统的重建和运动能力的恢复。但与此同时,可穿戴机器人缺乏对使用者运动意图认知的智能。因此,增强机器人的感知智能,提高人机交互共融性,是当前康复机器人技术面临的重要挑战。
恰当的助力时机对于执行有效的外骨骼助力,保证使用者安全性等都至关重要。现有的研究已经充分证明了表面肌电信号在识别人体运动意图的可行性。肌电信号是由肌肉收缩产生的生理电信号,其包含了与运动意图相关的直接信息;同时,肌电信号相较于肢体运动具有一定的超前性。通过解码该信号可以识别人的行为, 进而赋予外骨骼理解人的运动意图的智能,从而避免外骨骼的控制延迟。然而,基于肌电信号的意图识别方法但仍然面临以下挑战:(1)肌电幅值变化和电极偏移导致的不稳定性;(2)步态运动学预测的准确度。
B. Zhong, K. Guo, H. Yu, and M. Zhang, "Toward Gait Symmetry Enhancement via a Cable-Driven Exoskeleton Powered by Series Elastic Actuators," IEEE Robot. Automat. Lett., vol. 7, no. 2, pp. 786-793, 2022.
张明明课题组长期以来一直致力于面向生活任务的智能、精准、闭环、高效的神经康复技术及器械的开发和研究。近期该团队提出一种基于肌电信号预测连续下肢膝关节角度的解码方法,即基于肌肉协同驱动的自适应模糊神经网络预测模型(Muscle synergy- driven ANFIS model),实现了在不同步行速度下的膝关节角度的稳定连续预测。相关论文以《A Muscle Synergy-Driven ANFIS Approach to Predict Continuous Knee Joint Movement》为题发表于国际顶级期刊IEEE Transactions on Fuzzy Systems(IF=12.029)。
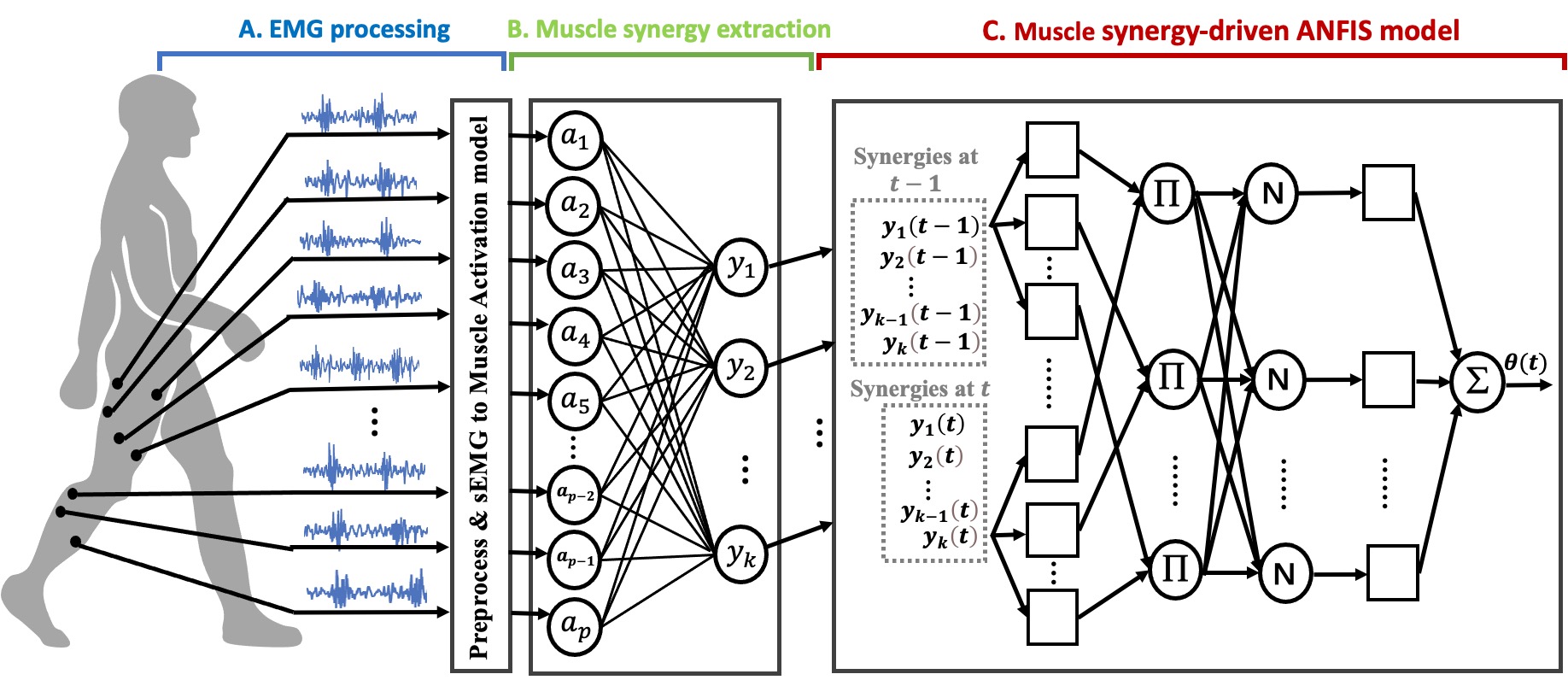
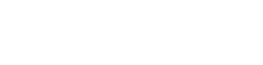
图1. 膝关节角度预测算法框架
本文首先利用多生理信号采集设备和人体光学运动捕捉设备同时获取受试者在行走过程中的下肢表面肌电信号和膝关节角度信息。然后将肌电数据进行预处理和肌肉协同的提取。这样的处理将原始的数值生理信息转换成了能反应神经控制策略的特征信息,同时肌肉协同方法也具有更强的鲁棒性和更高的计算效率。进而,以肌肉协同为输入驱动ANFIS模型,对受试者连续的膝关节角度进行鲁棒预测。
通过5种不同速度的步行实验表明, 本论文提出的Muscle synergy-driven ANFIS model的预测准确度达到相关系数为0.92±0.05,相比于目前基于当通道数值特征方法,预测准确性和计算效率均有显著性提升。同时,肌肉协同作为肌肉激活度与人体运动间的桥梁, 本方法有效地建立了两者的非线性关系,提高了模型的可解释性。
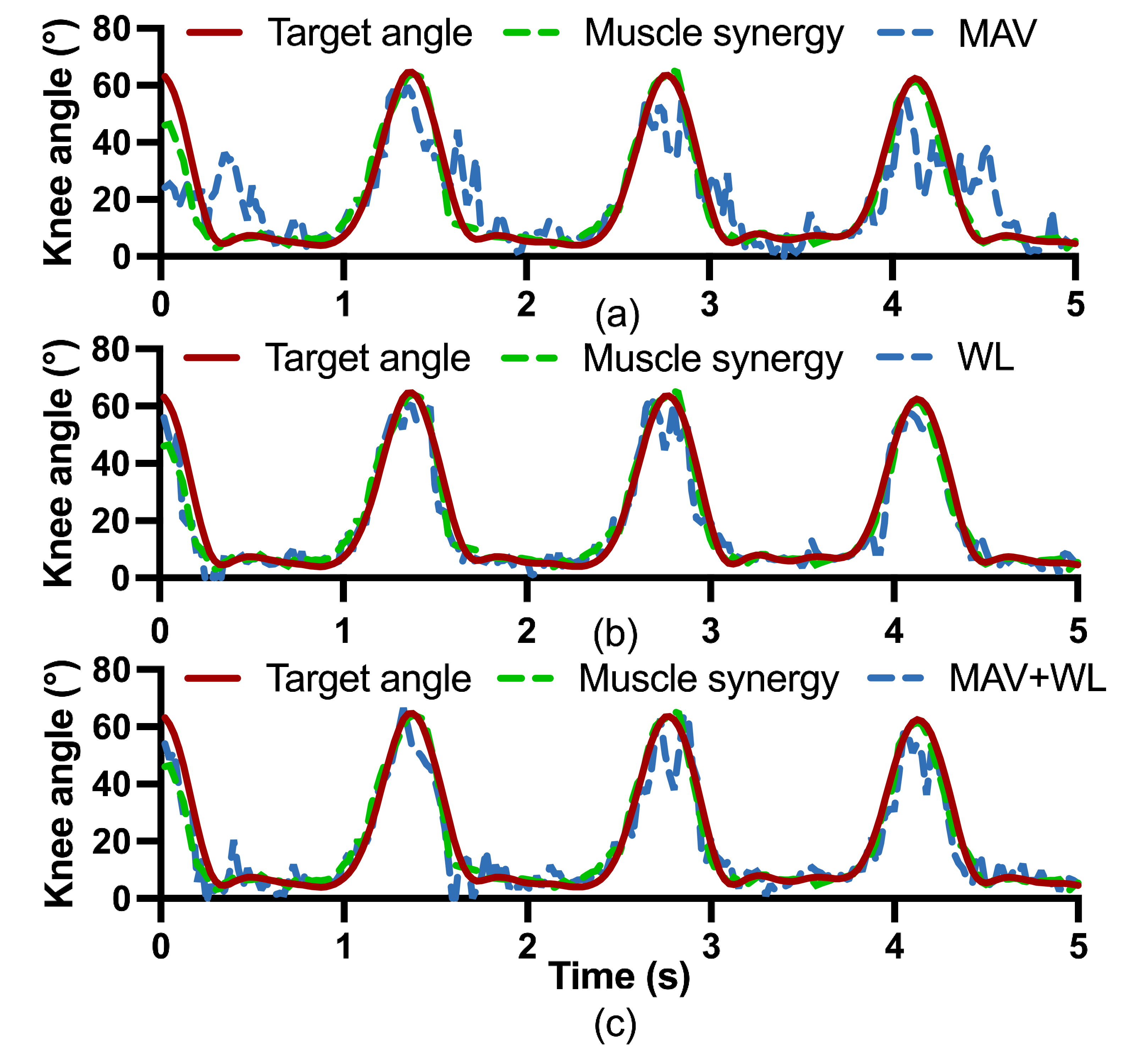
图2. 步态模式膝关节角度预测结果
图3. 不同步行速度下预测准确性统计结果
南方科技大学为论文第一通讯单位,硕士研究生钟文娟、付学明为论文共同第一作者,张明明为唯一通讯作者。研究得到国家自然科学基金及广东省自然科学基金等项目的资助。
原文链接:https://ieeexplore.ieee.org/document/9735420
撰文:钟文娟
审核:张明明
编辑:肖然

广东省深圳市南山区学苑大道1088号
bme@sustech.edu.cn

关注微信公众号